New Classification Filtering Options in OpenTopography
May 16, 2025
Lidar systems produce a high density 'point cloud' - a collection of precise three-dimensional coordinates - that offers a detailed digital representation of scanned surfaces and their features. To unlock the full potential of this data for analysis, these points are classified after collection using algorithms and manual processing to differentiate surface types. This means each point is assigned a code identifying the type of feature it reflected from—such as ground, buildings, or vegetation. The American Society for Photogrammetry and Remote Sensing (ASPRS) has established a widely adopted standard for lidar point classification codes (see LAS 1.4 specification doc here).
At OpenTopography, we provide lidar data as classified by our data providers, without re-classifying it during our ingest process. While this ensures data integrity, it can occasionally result in datasets with limited or inconsistent classifications. To address this issue, OpenTopography is excited to announce an update to our classification filtering options, providing significantly finer control over which point classifications are returned in your output dataset.
The user interface for lidar point cloud job submission has been enhanced to offer more granular control when filtering points by their classification values. Users will still find the familiar option to return "All Points", which performs no classification filtering and delivers all available lidar points. With the "All Points" option, you can also easily filter out noise by checking the box on the right-hand side. This action removes points classified as "Noise" (Class 7) and "High Noise" (Class 18).

The "Standard" classification profiles also remain available. These profiles are convenient groupings of common classifications that cater to most general use cases. Typical profiles include:
- Building (Class 6)
- Ground (Class 2)
- Unclassified (Classes 0 & 1)
- Vegetation (Classes 3,4, & 5)
- Water Surface (Classes 9,41, & 42)
- Bathymetry (Classes 26,29,31,40,43,44, & 45)
The user interface presents these standard classifications as check boxes, allowing users to mix and match as needed. The menu will present only those classification values that are available in each dataset. Note that noise values (classes 7 & 18) are automatically excluded in the standard classification profiles.

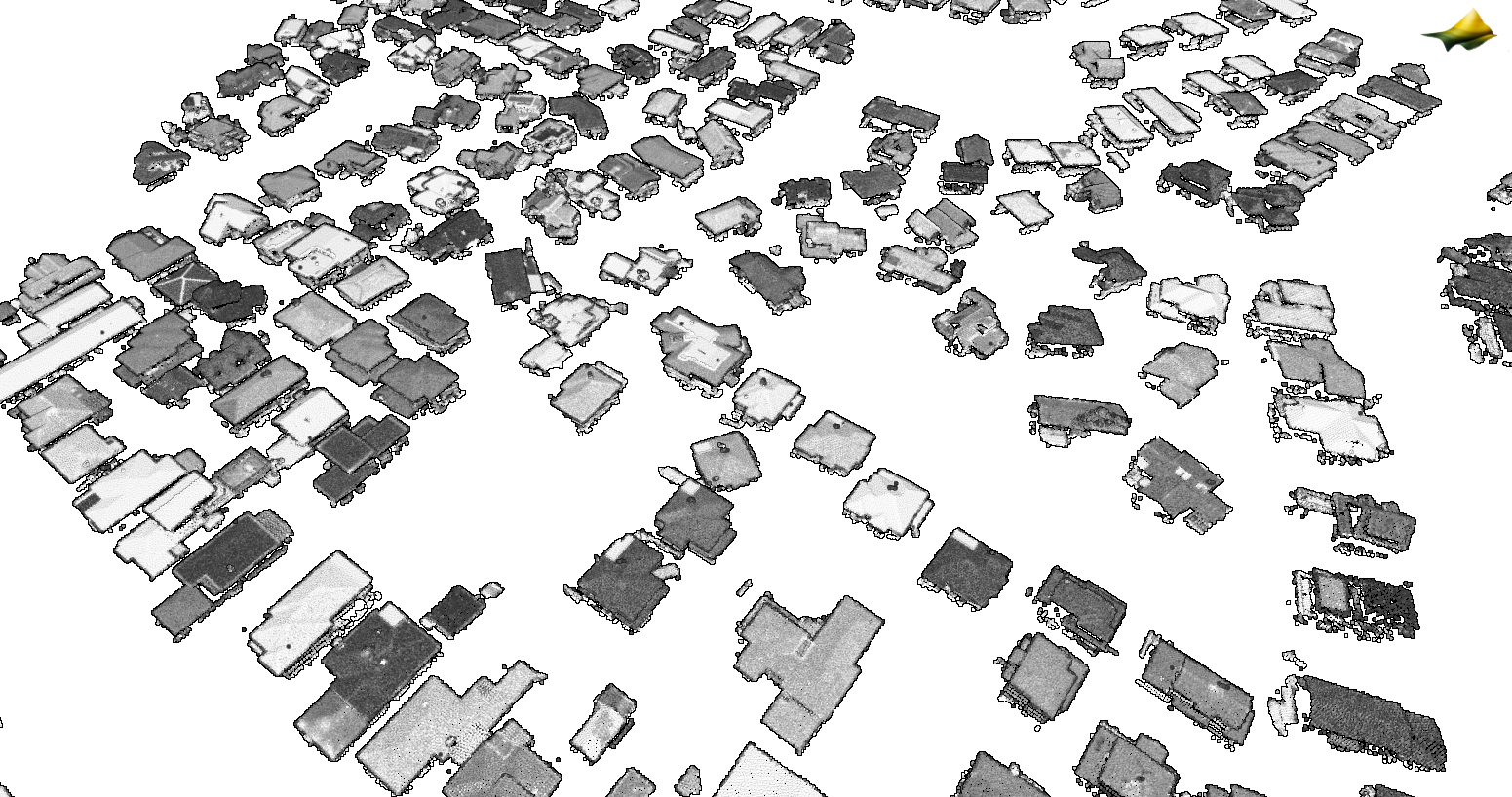
3D point cloud colored by intensity of a suburban housing area filtered to return only points with a building classification (class 6).
Introducing Advanced Classification Filtering!
We've recently added the new "Advanced" classification option to our filtering tools. With this option, users can see ALL of the available classifications per dataset and select the exact classifications they would like returned in their output dataset. For instance, if you need to isolate points classified specifically as "Bridge Deck" (Class 17), you can now select just that class, and all other points will be filtered out, giving you added control over your data selection.


The dataset, "Auckland Part 1, New Zealand 2024" has a "Bridge Deck" classification. Using the advanced classification filters, the bridge deck class was selected and only those points with a classification value of 17 were returned. This image shows the job selection area over the Tamaki River in New Zealand, and a 3D point cloud representation of just the points classified as "Bridge Deck". Points are colored by elevation value.
We hope the addition of this enhanced functionality will streamline your workflow, help you get exactly the data you need more efficiently, and reduce the amount of manual data manipulation required when working with lidar point cloud datasets downloaded from OpenTopography. As always, please send questions and comments to info@opentopography.org