Filtering vegetation from Terrestrial Laser Scanning data using the Point2Grid tool
Feb 26, 2010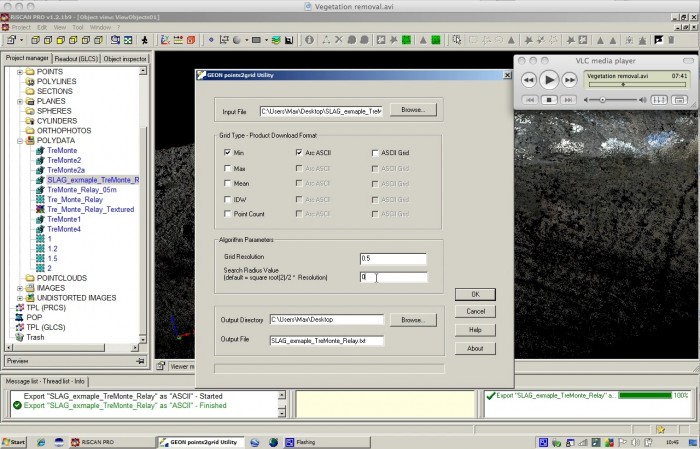
You can download the video here: Vegetation Removal.avi (124 MB download).
Max Wilkinson, a PhD student in the Dept. of Earth Sciences at Durham University in the UK, recently sent us a link to a video of a seminar he gave on methods of vegetation filtration from Terrestiral Laser Scanning (TLS) data using the Points2Grid tool developed by the OpenTopography team (originally developed with GEON funding). Points2Grid is a Windows application that implements the exact same DEM generation algorithm that is used in the OpenTopography point cloud processing system. It was developed to allow users to get the same DEM generation capabilities as are available in OpenTopography for non-hosted data.
Dealing with vegetation in TLS scanner data can be a significant problem, and Max shows in the video how he is able to use the MIN surface feature in P2G to remove much of the vegetation from the scan. Points2Grid is not technically designed to filter vegetation, but the minimum surface function can act as a low budget filter. P2G is also handy for reducing the complexity of the point cloud data down to something more manageable for analysis. In this case, Max has much higher shot densities than he needs to construct a surface from the data, and P2G helps to reduce the amount of data he is working with:
From the TLS perspective, I'm finding P2G is tremendously useful for distilling large pointsets down to a size whereby the computing time required to test various interpolation methods becomes bearable! I had previously spent many hours waiting to see the output of an interpolation based on millions of points, only to find the parameters I used were not quite right. With the reduced computing time I'm now able to run more interpolations in various programs with a range of different parameters to see the results. I'm now using arcGIS for interpolations of TLS data, rather than just goCAD. For example, I've just finished a flow routing analysis of footwall drainage in arcGIS. A big thank you to the team for making P2G available!
Screen capture of the video:
You can download the video here: Vegetation Removal.avi (124 MB download).
I had difficulties getting the file to play in Quicktime on a Mac, but the video played perfectly in open source (free) VLC player. You may also need this ffdshow codec provided by Max.
The GEON Points2Grid tool can be downloaded via the lidar.asu.edu site. I recommend reading the P2G Instructions / Help doc and also looking at the this page on how the search radius parameter in P2G works.